|
|
|
|
|
|
|
|
|
 |
|
|
 |
| |
Deep Learning based Pedestrian Inertial Navigation: Methods, Dataset and On-Device Inference Changhao Chen, Peijun Zhao, Chris Xiaoxuan Lu, Wei Wang, Andrew Markham, Niki Trigoni In IEEE Internet of Things Journal [PDF] [Bibtex] |
 |
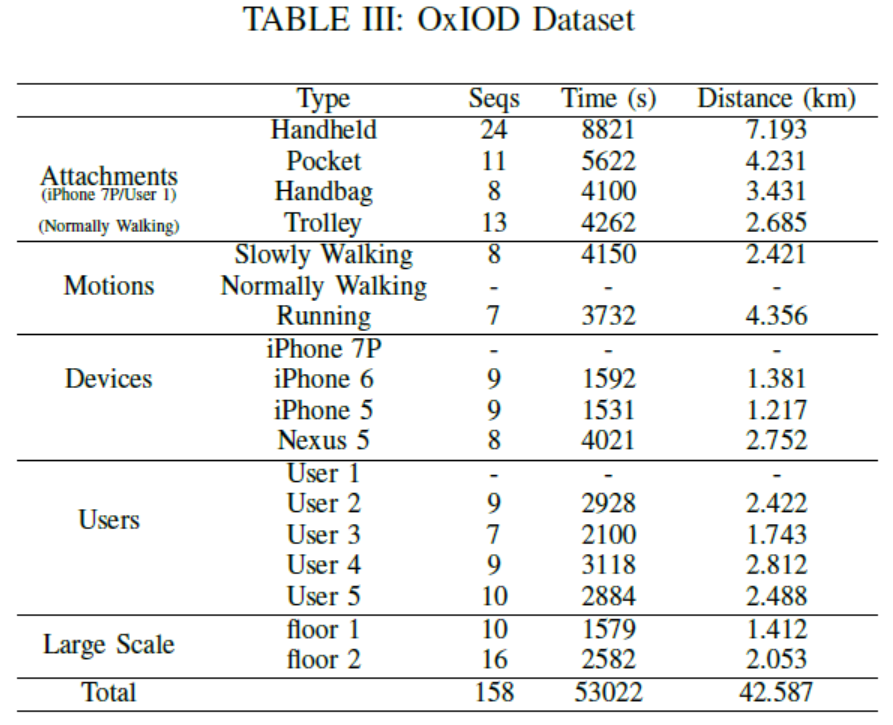
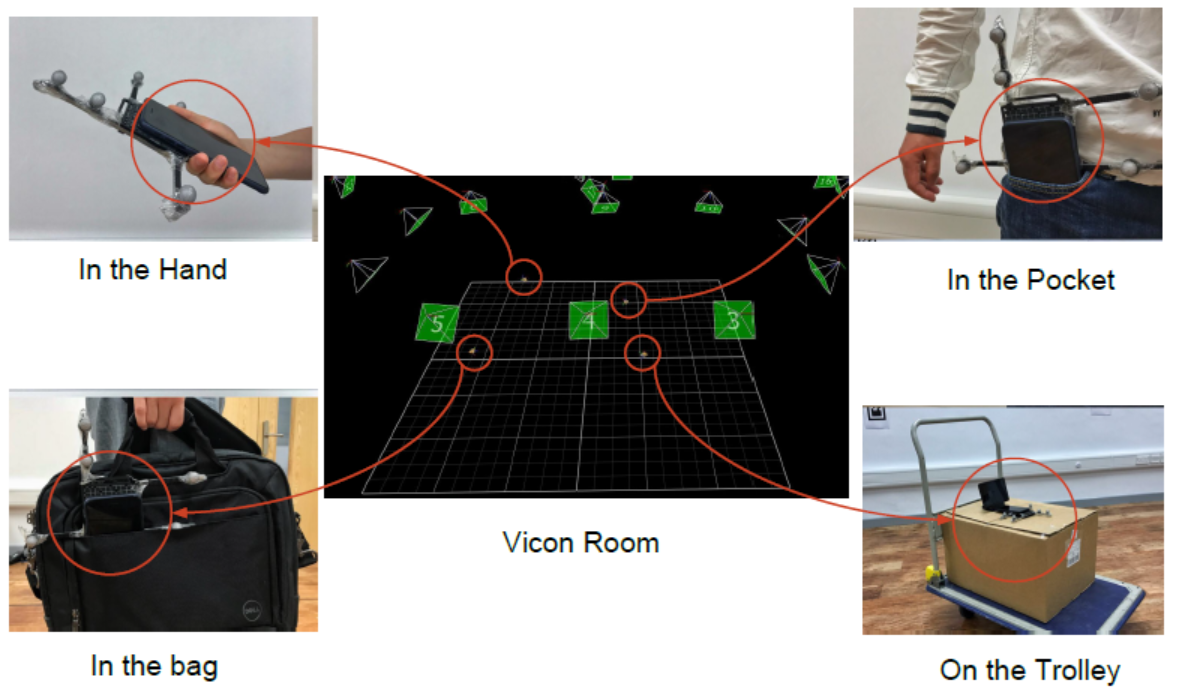
OxIOD: The Dataset for Deep Inertial Odometry Changhao Chen, Peijun Zhao, Chris Xiaoxuan Lu, Wei Wang, Andrew Markham, Niki Trigoni Technical Report. arXiv:1809.07491 [PDF (2.4 MB)] [Bibtex] |
| |
MotionTransformer: Transferring Neural Inertial Tracking Between Domains Changhao Chen, Yishu Miao, Chris Xiaoxuan Lu, Linhai Xie, Phil Blunsom, Andrew Markham, Niki Trigoni In AAAI 2019 [PDF (1.3 MB)] [Bibtex] |
 |
Deep Neural Network Based Inertial Odometry Using Low-cost Inertial Measurement Units Changhao Chen, Chris Xiaoxuan Lu, Johan Wahlstrom, Andrew Markham, Niki Trigoni In IEEE Transactions on Mobile Computing [PDF] [Bibtex] |
| |
IONet: Learning to Cure the Curse of Drift in Inertial Odometry Changhao Chen, Chris Xiaoxuan Lu, Andrew Markham, Niki Trigoni In AAAI 2018 [PDF (2.4 MB)] [Bibtex] |
|
|